一、设计方案
1.传感器选择
- 触觉传感器:选择基于碳纳米管(CNT)聚合物的柔性MEMS触觉微传感器,由于碳纳米管具有高度的灵敏度和选择性、柔韧性,可以作为触觉传感器,检测材料的微观结构和机械特性。
- 嗅觉传感器:选择基于碳纳米管(CNT)的电子鼻技术,利用碳纳米管对不同气味的识别能力,结合其高导电性,实现对奢侈品特定气味的敏感检测。
2.考量因素
- 灵敏度和选择性:传感器需要能够区分奢侈品材料的独特化学和物理特性
- 耐用性:传感器需要能够承受长期使用而不损失性能
- 集成性:传感器需要能够与机器人系统集成,便于携带和操作
- 成本效益:考虑到成本,选择性价比高的传感器
3.与机器人系统的机构关系
安装在机器人的末端执行器上,用于检测和模拟人类的触觉和嗅觉感知,通过触摸来识别材料的质地和硬度。同时,触摸时可以近距离的收集奢侈品气味,进而进行分析。传感器数据通过通信技术实时发送到中央处理单元CPU,CPU中包括感知融合和模式识别算法,通过预测加权融合技术、遗传算法优化的模糊融合等方法,鉴定奢侈品真伪。
二、传感器安装
考虑到机器人需要对奢侈品进行细致的检查,传感器应该安装在能够接触到奢侈品表面的位置。笔者精心将传感器设计为触须状,以便于精确地探测奢侈品的表面特征。我们可以将碳纳米管须状传感器布置到机器人的末端执行器上,例如机器人的手指或手掌上,模拟人类通过触摸来感知物体的质地和硬度,亦或直接布置到传送带上,这样的目的是可以方便地对目标物体进行接触和数据采集。通过柔性须状传感器,这样可以对各种大小、形状的奢侈品进行检测,增强系统的鲁棒性。
同时,对于嗅觉传感器而言同样可以布置到机器人手指或手掌上,以便测量触觉的同时,更好的靠近物体进行气味分析
1.论证
- 直接接触:手指和手掌是机器人系统与物体接触最直接的部位,便于进行细致的触觉和嗅觉分析
- 信息密度:手指关节的灵活性允许传感器从不同角度接触物体,同时将传感器设计为触须状,这些都可以增加信息的收集范围,更好的鉴定奢侈品的真伪
- 高灵活性:安装在机器人末端的传感器可以通过末端执行器的移动来调整与物体的距离,提高操作的便捷性
2.多模态融合的考虑
由于感知系统需要同时收集触觉和嗅觉两个模态的信息,一方面,要尽量确保触觉和嗅觉传感器的数据采集可以同步进行,以便进行有效的数据同步、融合;另一方面,考虑它们之间的协调性,避免相互的干涉。
3.安装草图
- 机器人的手臂:在手臂的末端执行器上安装触觉传感器,可能在每个手指的指尖上安装一个或多个传感器。
- 机器人的头部:在头部的前部安装一个或多个嗅觉传感器,可能设计一个可伸缩的机械臂,用于将嗅觉传感器移动到不同的工作距离。
- 数据处理单元:位于机器人的躯干内部,负责收集和处理来自所有传感器的数据。
第一类 章鱼触手状触嗅觉机器人


第二类 类触手状触嗅觉机器人


第三类 基于人型的触手状触嗅觉机器人


4.安装维护
传感器设计外表包有一层保护层,作为传感器的防护措施,防止在操作过程中损坏;同时安装在端部的传感器,也便于后续的维护和更换
三、传感器工作原理
1.触觉传感器
触觉传感器能够感应到压力、振动、纹理等物理刺激,通过电阻、电容或压电效应的变化来实现。碳纳米管CNT具有极高的灵敏度和机械强度,可以作为触觉传感器的活性材料,通过其电阻的变化检测微小的力或形变。触觉传感器的工作原理主要涉及将物理接触力转换为电信号的过程,目前主流的技术和工作机制主要有以下集中
- 压阻效应:利用碳纳米管的高导电性和良好的机械性能,通过其与其他材料(如聚偏二氟乙烯PVDF)的复合,形成具有高灵敏度的压阻传感元件。当外部施加压力时,这种结构能够通过有效改变其电阻值,从而产生可测量的电信号。
- 压电效应:基于PVDF或类似材料的压电薄膜,在受到压力时会产生电荷分布的变化,从而产生电压信号,这种传感器具有高灵敏度和良好的温度稳定性,适用于需要精确测量微小压力的应用场景。
- 电容式传感器:通过改变传感器表面的微观结构(如纳米锥体阵列)来调节其电容值,当传感器表面与外界物体接触时,其电容值会发生变化,这种变化可以被检测并转换为电信号。这种传感器适合于需要高灵敏度和快速响应的应用,如微弱压力的检测。
由于本项目主要是测量皮革奢侈品真伪,在触觉方面,主要通过按压、摩擦来检测皮革产品的毛孔大小、应力应变等物理属性,因此,结合压电效应传感器和电容式传感器集成到一个系统中,实现多模态信息的融合,同时获取接触力的大小、方向以及材料属性等多维度信息。从传感器拓扑结构布置上,进行仿生设计,模仿八爪鱼🐙触须,对于待检测的物品进行包裹,以获得更丰富的数据信息,有助于提高鉴定的准确性和效率
大致的处理流程:
- 传感器采集数据:传感器与物体接触时,碳纳米管的结构会因外力而发生形变,导致其导电性发生变化
- 数据转化:传感器通过电路测量转化成电信号,从而实现对物体硬度、弹性、纹理等特性的检测
- 信号处理:将收集到的信号通过信号放大、滤波和模数转换等步骤进行处理
- 数据分析:通过机器学习算法等数据分析处理、模式识别,以识别和分类不同的触觉特征,这些特种需要可以用来区分奢侈品的真伪
- 多模态融合:将多个传感器的数据相结合,通过多模态数据融合软法提高鉴定的准确性
2.嗅觉传感器
嗅觉传感器的工作原理主要是基于仿生嗅觉系统机制。目前研究发现,生物嗅觉系统能够通过嗅上皮与气味分子结合,将外界的气味刺激通过嗅球传递到大脑嗅觉皮层,具有较高的灵敏度和特异性。仿生嗅觉传感器需要采用生物活性材料作为敏感元件,如嗅觉受体蛋白,这些蛋白可以选择性的与特定的气味分子相结合,并激活细胞内喜好转导通路,从而产生动作电位。这些动作电位可以被二级换能器捕捉并转换为可测量的物理信号
在具体的技术实现中,可以采用基因工程技术表达特定的嗅觉受体蛋白,并将其固定在适当的物理化学探测器上,或者使用金属氧化物半导体MOS或碳纳米管,对特定气体分子有较高的亲和力。例如,可以将嗅觉受体蛋白ODR-10表达在异源细胞系统中,并利用石英晶体微天平作为二级传感器来检测对丁二酮等特定气味分子的响应。此外,还可以通过多通道电极阵列实时记录嗅感觉神经元对不同气味的胞外电位信号,以提高检测的灵敏度和特异性。
大致的处理流程
- 气体分子吸附:嗅觉传感器检测道空气中的气体分子,这些分子会吸附在传感器的表面
- 电阻变化:当气体分子吸附到敏感材料上时,引起材料电阻的变化,这种变化与气体分子的种类和浓度有关
- 信号转换:将电阻变化转换成电信号,通过电路进行放大和滤波处理
- 模式识别:使用机器学习算法来识别和分类不同的气味特征
- 多模态融合:将多个传感器的数据相结合,通过多模态数据融合软法提高鉴定的准确性
四、测量电路设计
1.触觉传感器电路设计
| 输入 | 机械形变。当触觉传感器与物体接触时,碳纳米管的结构会根据施加的力量和压力、温度、位移发生形变 | |
| 测量电路 | 预放器 | 输入:触觉传感器的微小电阻变化 |
| 输出:放大的电压信号 | ||
| 作用:由于传感器产生的信号非常微弱,预放器用于放大信号,使其足以被后续电路处理 | ||
| 滤波器 | 输入:来自预放器的放大信号 | |
| 输出:滤除噪声后的信号 | ||
| 作用:滤除不需要的频率成分,如环境噪声,保留与触觉相关的信号 | ||
| 模数转换器ADC | 输入:滤波后的模拟信号 | |
| 输出:数字信号 | ||
| 作用:将模拟信号转换为数字信号,以便由微控制器或计算机进行处理 | ||
| 微控制器 | 输入:ADC转换后的数字信号 | |
| 输出:处理后的数据,用于决策支持系统 | ||
| 作用:执行算法,如特征提取和模式识别,以及控制传感器操作 | ||
| 通信接口 | 输入/输出:与外部系统的通信 | |
| 作用:允许测量电路与外部系统(如计算机或机器人控制系统)进行数据交换 | ||
| 输出 | 形变导致碳纳米管的电阻发生变化,这种变化经过信号处理后转化为电信号输出,用于进一步的数据分析或无线传输 | |

2.嗅觉传感器电路设计
| 输入 | 气体分子:嗅觉传感器暴露于空气中,能够吸附特定的气体分子 | |
| 测量电路 | 气体敏感材料 | 输入:特定气体分子 |
| 输出:电阻或电压变化 | ||
| 作用:作为传感器的核心,对特定气体分子有响应 | ||
| 信号调理电路 | 输入:敏感材料的电阻或电压变化 | |
| 输出:适合放大的信号 | ||
| 作用:将敏感材料的微弱信号转换为更容易放大和处理的形式 | ||
| 放大器 | 输入:调理后的信号 | |
| 输出:放大的电压信号 | ||
| 作用:放大信号,以便于后续的模数转换 | ||
| 模数转换器ADC | 输入:放大的模拟信号 | |
| 输出:数字信号 | ||
| 作用:将模拟信号转换为数字信号,以便于微控制器处理 | ||
| 微控制器 | 输入:ADC转换后的数字信号 | |
| 输出:处理后的数据,用于决策支持系统 | ||
| 作用:执行数据处理算法,如特征提取和模式识别 | ||
| 通信接口 | 输入/输出:与外部系统的通信 | |
| 作用:允许测量电路与外部系统(如计算机或机器人控制系统)进行数据交换 | ||
| 输出 | 电信号:气体分子的吸附导致敏感材料的电阻或电压发生变化,这种变化转换成电信号输出。 | |

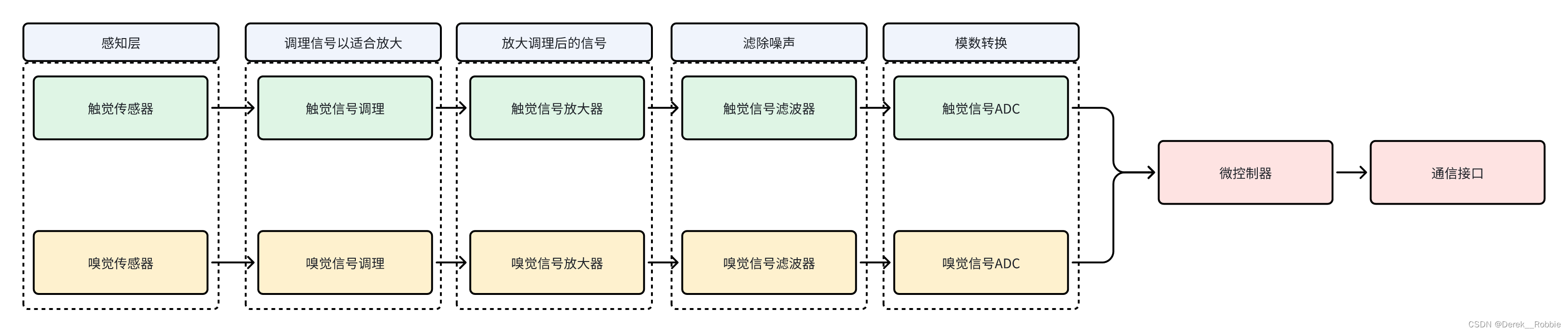
3.全电路设计
| 输入 | 触觉输入:当触觉传感器与物体接触时,碳纳米管的结构会根据施加的力量、压力、温度、位移、纹理发生形变 | |
| 嗅觉输入:暴露于空气中的嗅觉传感器,吸附特定的气体分子 | ||
| 测量电路 | 信号调理 | 触觉信号调理: 将触觉传感器的信号转换为适合放大的形式 |
| 嗅觉信号调理: 将嗅觉传感器的信号转换为适合放大的形式 | ||
| 信号放大 | 触觉信号放大器: 放大调理后的触觉信号 | |
| 嗅觉信号放大器: 放大调理后的嗅觉信号 | ||
| 信号滤波器 | 触觉信号滤波器: 滤除噪声,保留有用的触觉信号 | |
| 嗅觉信号滤波器: 滤除噪声,保留有用的嗅觉信号 | ||
| 信号ADC | 触觉信号ADC: 将模拟触觉信号转换为数字信号 | |
| 嗅觉信号ADC: 将模拟嗅觉信号转换为数字信号 | ||
| 微控制器 | 处理来自触觉和嗅觉传感器的数字信号,执行数据融合和模式识别算法 | |
| 通信接口 | 与外部系统(如计算机或显示设备)进行数据交换 | |
| 输出 | 将碳纳米管所接收的传感信息,转化为电信号输出,用于进一步的数据分析或无线传输 | |
五、数据处理
单一信号直接使用,如何应用在机器人中?多信号的话如何融合?
1.触觉信号
- 检测物理特性:直接测量物体的硬度、弹性、纹理、材质等不同材料和结构物理特性,从而识别出物体的特征
- 数据采集:当机器人的触觉传感器与物体接触时,传感器采集到相应的电阻变化信号
- 信号转换:采集到的触觉信号,通过电路转换为电信号,然后通过ADC转换为数字信号
- 数据处理:由CPU进行处理,提取有助于鉴定的特征,如压力分布、振动频率等
2.嗅觉信号
- 检测化学特性:检测物体释放的特定气味分子,从而使别其化学特性
- 气体分析吸附:触觉传感器暴露于物体附近,吸附特定的气味分子
- 信号变化:气体分子的吸附导致传感器材料的电阻或电压发生变化
- 信号处理:变化的信号经过调理、放大、滤波,然后通过ADC转换为数字信号
- 化学分析:数字信号被处理以识别特定的化学物质,并检测是否有添加化学物质的迹象
3.多信号融合
- 数据同步:确保触觉和嗅觉传感器的数据能够在同一时间戳被采集和同步处理
- 信号处理:将触觉和嗅觉传感器的数据整合到仪器,形成一个在综合的数据集
- 特征提取:从整合后的数据中提取有助于奢侈品真伪鉴定的关键特征
- 模式识别:利用机器学习算法对提取的特征进行分析,以识别和分类奢侈品的真伪
- 决策支持:基于模式识别的结果,为鉴定人员提供决策支持
过程
- 数据层融合:在最基础的层面上,将嗅觉和触觉传感器的数据简单合并
- 特征层融合:从各自的数据中提取特征,结合这些特征进一步分析
- 决策层融合:利用各自的决策结果,如真伪分类概率进行综合,以提高整体的鉴定准确率
- 算法优化:通过不断学习优化,调整融合算法以适应不同鉴定任务和提高性能
4.实际应用
将触觉和嗅觉传感器集成到机器人的机械手指尖,进行传感器的集成,能够在触觉和嗅觉两个维度上评估奢侈品的真伪。通过设计硬件接口,使传感器能够与机器人的控制系统通信。开发软件程序,实现传感器数据的采集、处理、融合和决策支持。
六、应用场景
| 应用场景 | 需求 | 检测量 | 重要性 |
| 奢侈品零售和鉴定中心 | 确保其销售的奢侈品是真品,以维护品牌声誉和消费者信任 | 材料的质感、纹理、气味等物理和化学特性 | 防止假冒伪劣商品流入市场,保护消费者权益和品牌价值 |
| 海关和边境检查 | 快速识别和拦截假冒奢侈品,以减少非法贸易和税收损失 | 快速检测物品的真伪,包括材料特性和气味 | 加强知识产权保护,防止非法商品流通,确保国家税收和经济安全 |
| 保险行业 | 在为奢侈品提供保险服务前,需要验证其真伪和价值 | 验证奢侈品的材料、工艺和品牌标识的真伪 | 确保保险赔付基于真实和准确的物品价值,降低欺诈风险 |
| 拍卖和二手奢侈品市场 | 在拍卖或二手交易前,需要对奢侈品的真伪进行鉴定 | 物品的物理状态、磨损程度、原始材料特性和气味 | 为买卖双方提供透明度,确保交易的公平性和合法性 |
| 法医和犯罪调查 | 在犯罪调查中,可能需要鉴定查获物品的真伪,以追踪犯罪网络和评估非法所得 | 物品的详细物理和化学特征,以及与已知真品的对比分析 | 帮助执法机构追踪犯罪活动,为法庭提供证据 |
| 质量控制和制造 | 在奢侈品生产过程中,需要确保使用的材料和工艺符合高标准 | 原材料和制成品的物理、化学和感官特性 | 保证产品质量,维护品牌形象和消费者满意度 |
七、参考文献
- Jing Li, Yijiang Lu et al. “Carbon Nanotube Sensors for Gas and Organic Vapor Detection.” Nano Letters(2003).
- Y. Xin, Hongying Tian et al. “A biomimetic tactile sensing system based on polyvinylidene fluoride film..” Review of Scientific Instruments (2016). 025002 . 4. Sangjun Sim, E. Jo et al. “Highly Sensitive Flexible Tactile Sensors in Wide Sensing Range Enabled by Hierarchical Topography of Biaxially Strained and Capillary-Densified Carbon Nanotube Bundles..” Small (2021). e2105334 .
- R. Atoche-Enseñat, E. Perez et al. “A Smart Tactile Sensing System Based on Carbon Nanotube/Polypropylene Composites for Wearable Applications.” IEEE Sensors Journal (2023). 2948-2955.
- Frederico R Baptista, Samir A. Belhout et al. “Recent developments in carbon nanomaterial sensors..” Chemical Society Reviews (2015). 4433-53 .
- 张红雨,徐琳,王乃岩.皮革产品的ATR-FTIR快速鉴定[J].光谱实验室,2004(06):1189-1191.
- R. Xie, Shanshan Hou et al. “Leather‐Based Strain Sensor with Hierarchical Structure for Motion Monitoring.” Advanced Materials & Technologies (2019).
- Mallory L Hammock, Alex Chortos et al. “25th Anniversary Article: The Evolution of Electronic Skin (E‐Skin): A Brief History, Design Considerations, and Recent Progress.” Advances in Materials(2013).
- Morteza Amjadi, Aekachan Pichitpajongkit et al. “Highly stretchable and sensitive strain sensor based on silver nanowire-elastomer nanocomposite..” ACS Nano(2014).
- Morteza Amjadi, Ki-Uk Kyung et al. “Stretchable, Skin‐Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review.” Advanced Functional Materials(2016).
- 张三,张国庆,董继先等.基于PLC的皮革感官特性测试仪[J].皮革科学与工程,2010,20(03):66-69.
- 33. ATR-FTIR多元统计建模快速鉴别天然皮革检测技术研究 [2018-12-06]
- B. Pan, K. Qian et al. “Two-dimensional digital image correlation for in-plane displacement and strain measurement: a review.” Measurement Science and Technology(2009).
- 智能计算平台获20亿元A轮融资;腾讯等四家战投生物原料商 ...
- 图灵深视科技有限公司_全品类AI极速鉴定_鉴别潮鞋真假_鉴别 ...
- Ai 鉴定二手奢侈品真伪,相关公司称准确率达 99.1% - It之家
- 3D打印微流控电子皮肤+机器学习,用于多模态健康监测 - 微迷
- 2024-2029年柔性触觉传感器/电子皮肤行业市场深度调研及 ...
- Yiyao Peng, N. Yang et al. “Recent Advances in Flexible Tactile Sensors for Intelligent Systems.” Italian National Conference on Sensors (2021).
- Juntian Qu, Baijin Mao et al. “Recent Progress in Advanced Tactile Sensing Technologies for Soft Grippers.” Advanced Functional Materials (2023).
- Yuan Zhu, Yang Liu et al. “Recent Advances in Resistive Sensor Technology for Tactile Perception: A Review.” IEEE Sensors Journal (2022). 15635-15649.
- Sonja Groß, Amartya Ganguly et al. “The Next Evolution of Artificial Sense of Touch.” arXiv.org (2023).
- 电容式柔性触觉传感器的研究与进展 [2017-09-14]
- 基于导电聚合物的柔性MEMS压阻式触觉传感器阵列的研究 [2017-01-01]
- 许玉杰,孙英,尹泽楠.压阻式触觉传感器对法向力和剪切力的检测[J].传感器与微系统,2018,37(03):110-111+114.
- 马志豪. 摩擦电-压阻复合式触觉传感器[D].深圳大学,2020.


![[论文笔记]Corrective Retrieval Augmented Generation](https://img-blog.csdnimg.cn/img_convert/3878170d5dcda1dfc9a8de7c8d867086.png)